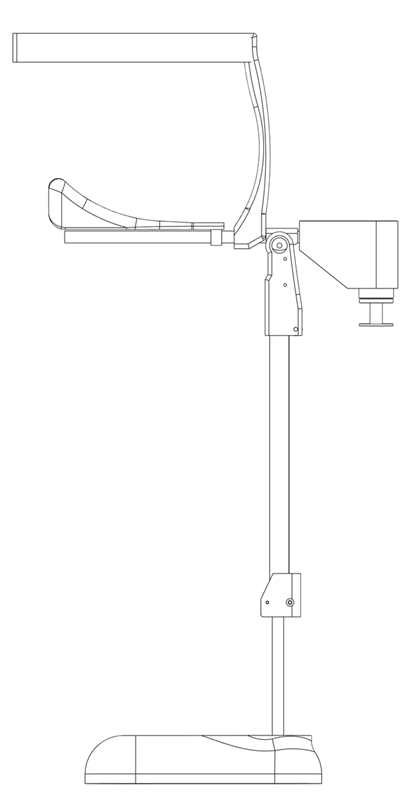
Walking issues are a brake to autonomy and social link for people who are not in full possession of their physical capabilities. We propose to develop a physical device attached to the patient's waist and feet that will relieve a portion of his weight. Existing products, such as Dnsys or Hypershell, only provide muscular assistance at the cost of increased weight to be carried by the wearer, and a short battery life. The proposed device provides 6kg of support for the patient's weight, with a walking speed of up to 6km/h and a battery life of 2 hours. Placed between its legs, a thin telescopic structure supports a saddle on which the patient can rest. This approach both reduces the load on the joint of the patient and assists the muscles. The device carries it's own weight (allowing for larger batteries). The patient stays in full control of their movement, as many degrees of liberty of the device are passive.
I am a PhD student in Robotics at EPFL Microcity, but I am conducting this project out of personal interest. I have been working on it since May 2026, and I am planning to launch a start-up based on it. I managed to make a first prototype suitable for outdoor use (see demo attached), and a patent has been deposited. I experimented with different materials to obtain a resistant design: the tubular structure uses carbon fiber tubes, ASA 3d printed parts are UV and temperature resistant.
After a first round of feedback, I am working on silent and faster actuators (e.g. direct drive brushless motors), a more stable control loop, and improved battery life and comfort for the user.
I am looking to establish a partnership with a healthcare structure in order to get feedback from experts in healthcare and patient autonomy. As soon as the design is stable and thoroughly tested, this partnership could bring autonomy to the patients who need it.
